DK55320CP50000IO Ver la hoja de datos (PDF) - Unspecified
Número de pieza
componentes Descripción
Fabricante
DK55320CP50000IO Datasheet PDF : 43 Pages
| |||
The CP chip is a self-contained motion processor. In addition to handling all system functions, the
CP chip contains the profile generator, which calculates velocity, acceleration, and position values for
a trajectory. Then the CP chip generates step and direction signals.
Optional axis position information returns to the motion processor in the form of encoder feedback
using either the incremental encoder input signals, or via the bus as parallel word input.
The MC55110 can co-exist in a CANOpen network as a slave device. It is CAN 2.0B compliant.
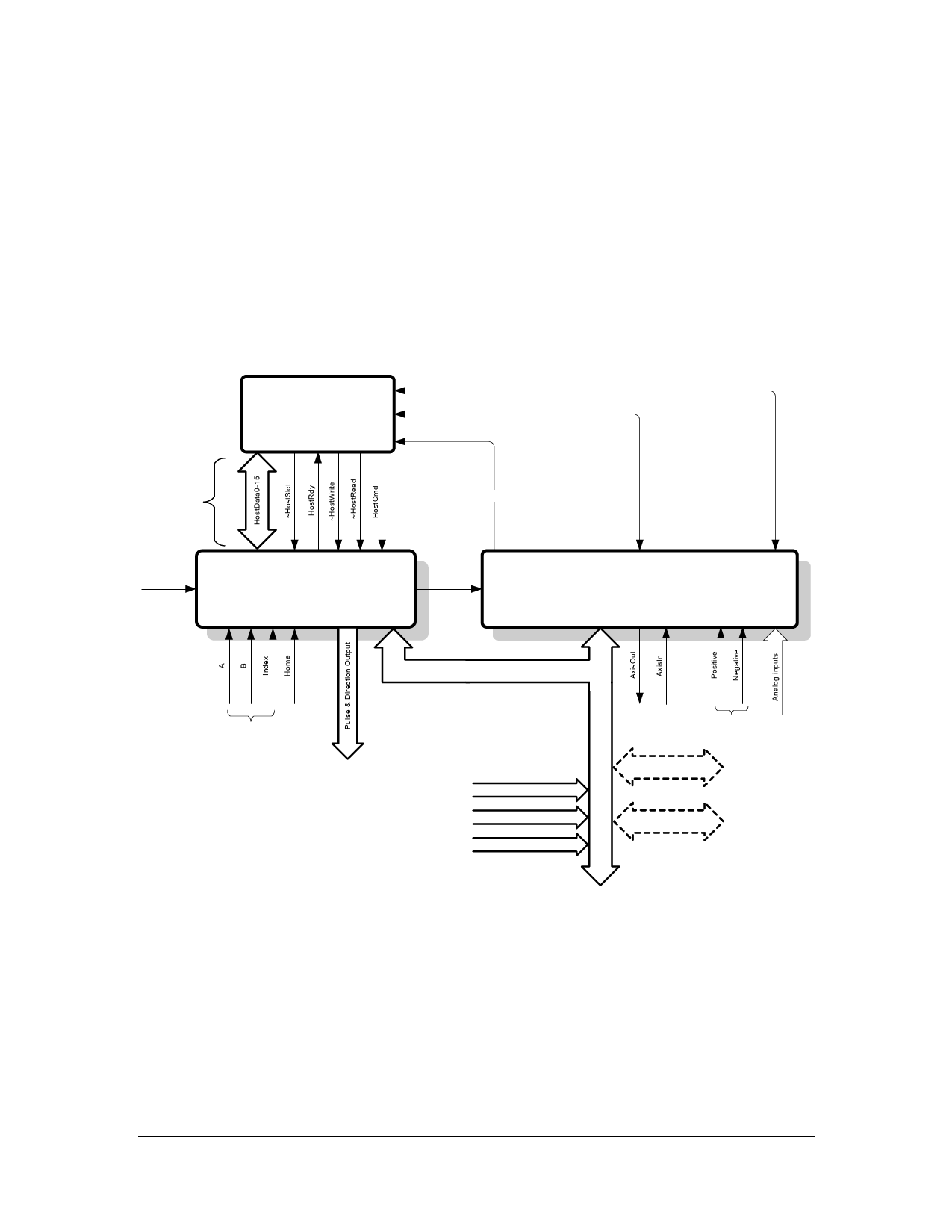
2.5 MC55020 System configuration – Two chip, 1 to 4 axis control
The following figure shows the principal control and data paths in an MC55020 system.
Host
CANOpen/CAN 2.0B network
Serial network
Parallel port
40 MHz
clock
IO
HostIntrpt
20MHz clock
CP
16-bit data bus
Encoder
Motor amplifier
Serial port configuration
CAN bus configuration
Parallel word input
Limit
switches
External memory
User I/O
Other user devices
The IO chip contains the parallel host interface, the incremental encoder input along with pulse and
direction motor output signals.
The CP chip contains the profile generator, which calculates velocity, acceleration, and position
values for a trajectory and communicates the results to the IO chip for output.
Optional axis position information returns to the motion processor in the form of encoder feedback
using either the incremental encoder input signals, or via the bus as parallel word input.
The MC55020 can co-exist in a CANOpen network as a slave device. It is CAN 2.0B compliant.
MC55000 Electrical Specification – Preliminary 11/14/2003
17
Share Link: 