FAN8420D3 View Datasheet(PDF) - Fairchild Semiconductor
Part Name
Description
Manufacturer
FAN8420D3 Datasheet PDF : 18 Pages
| |||
FAN8420D3
Application Information
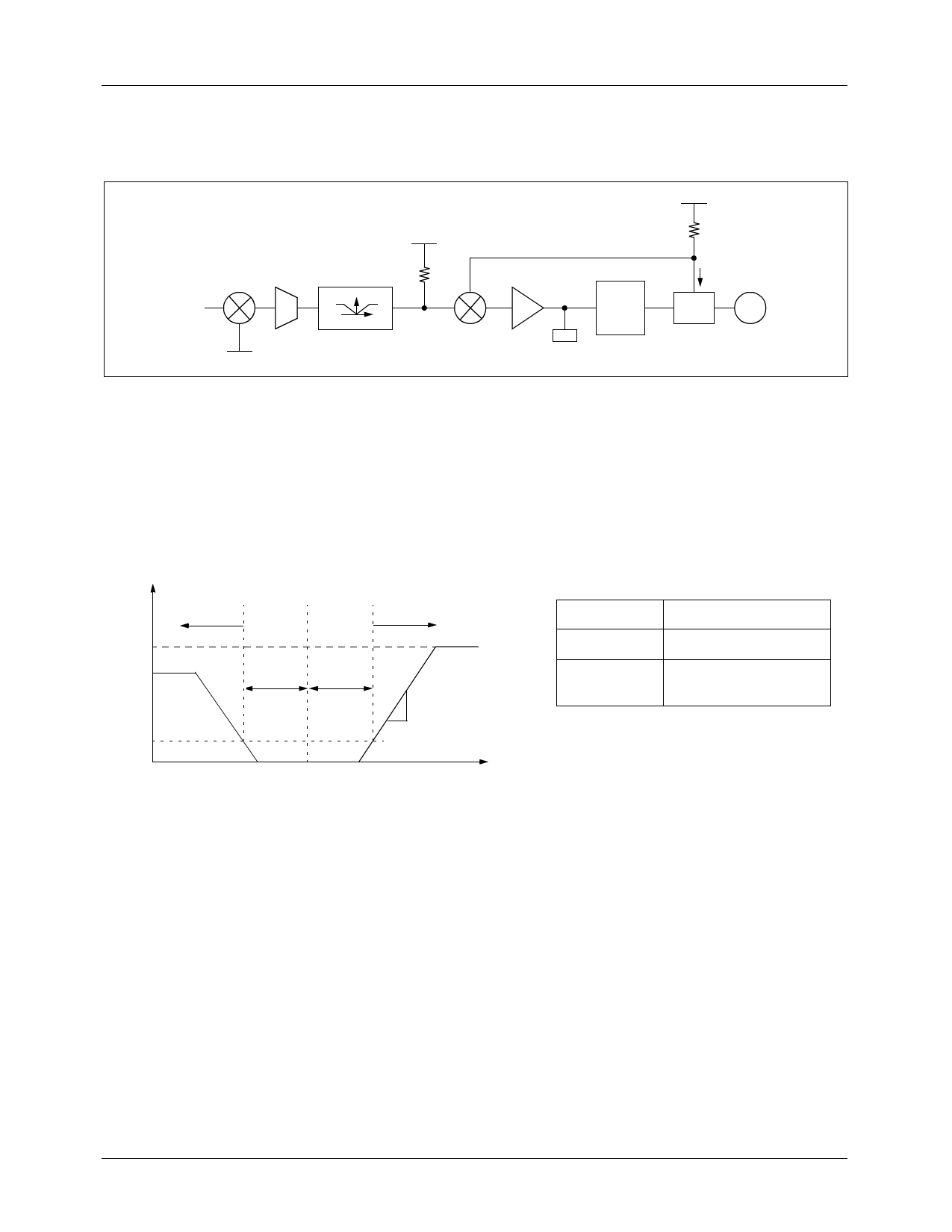
1. Torque Control & Output Current Control
Torque AMP
ECR +
−
EC
VM
+
VM
VCS RCS
−
Current Sense AMP
IO
−
+
ECR-EC
Gain
Controller
Driver
M
TSD
• By amplifying the voltage difference between EC and Ecr from servo IC, the torque sense amp produces the input (VAMP)
for the current sense amp.
• The output current (IO) is converted into the voltage (VCS) through the sense resistor (RCS) and compared with the VAMP.
By the negative feedback loop, the sensed output voltage, VCS is equal to the input VAMP. Therefore, the output current
(IO) is linearly controlled by the input VAMP.
• As a result, the signals, EC and ECR can control the velocity of the Motor by controlling the output current (IO) of the
driver.
• The range of the torque voltage is as shown below.
Current
[mA]
700
500
Reverse
Forward
Ecoff- Ecoff+
ECR > Ec
ECR < Ec
0.71[A/V]
6
-50mV 0
50mV
ECR -EC
The input range of ECR and EC is 0.2 V ~ 3.3 V ( RNF = 0.5[Ω] )
Rotation
Forward rotation
Stop after detecting re-
verse rotation
8
Rev. 1.0.1
Oct.. 2000.
Share Link: 